On this tutorial, I’ll share how I take advantage of Blackbox logs to tune filters and PID on a Betaflight FPV Drone. I will likely be utilizing PIDToolBox as the first instrument for filter and PID tuning, with Blackbox Explorer as a secondary instrument for Feedforward and common troubleshooting.

Disclaimer: This information is supposed for informational functions solely. The creator holds no accountability for damages ensuing from actions taken by the readers.
Blackbox will not be a should for tuning as defined on this information, but it surely offers full perception into what’s taking place with the drone and means that you can unleash its full potential. Issues like noise filtering and tiny overshoots are seen solely in Blackbox. For those who’re a perfectionist or simply somebody who likes to tinker, that is the tutorial for you.
In case you are new to Blackbox, be certain that to take a look at the Blackbox for newcomers tutorial..
I spent over 200 hours making this 8000-word tutorial! For those who discover my content material helpful, please take into account supporting my work.
Getting Began
Tuning targets
Utilizing Blackbox to tune our FPV drone, we goal to attain two foremost targets:
- Extra Efficient Use of Filters: Use minimal filtering to reduce delay however sufficient to maintain noise at a suitable stage.
- Optimized PID Positive factors and Associated Settings: Make sure the drone flies exactly and responsively.
Fundamental configurations
0. {Hardware} Guidelines
- Flight Controller (FC) Stack: Select an FC stack with rubber grommets (gummies) for sturdiness and noise efficiency.
- Metallic Screws: Use metallic screws for the FC stack; keep away from nylon/plastic screws/standoffs as they’re vulnerable to breakage and vibrations. If spacers are wanted, use comfortable silicone ones. Lighter titanium screws can save just a few grams.
- Locking Stack Screws: Safe the stack screws firmly with a metallic nut earlier than mounting the 4in1 ESC. In case your body has pressed insert nuts, extra nuts are usually not wanted. Tighten screws by hand first, then give a remaining squeeze with a wrench/screwdriver.

Use 4 plastic nuts to safe the FC stack. Tighten the nuts by hand to keep away from excessively crushing the gummies, permitting the comfortable mount to work successfully.

1. Blackbox Recording Settings
Choose the next settings within the Blackbox Configuration:
- Logging Gadget: Onboard Flash or SD Card
- Logging Fee: 2KHz (or 1.6KHz for BMI270 Gyro)
- Debug Mode: GYRO_SCALED (information unfiltered gyro sign)
- Information Included: To save lots of house for longer recordings, deselect pointless information like Altitude, GPS, and Magnetometer, or depart at default.

2. Disable the ADC filter in your OpenTX/EdgeTX radio (System -> {Hardware}) to cut back latency.

3. ESC settings:
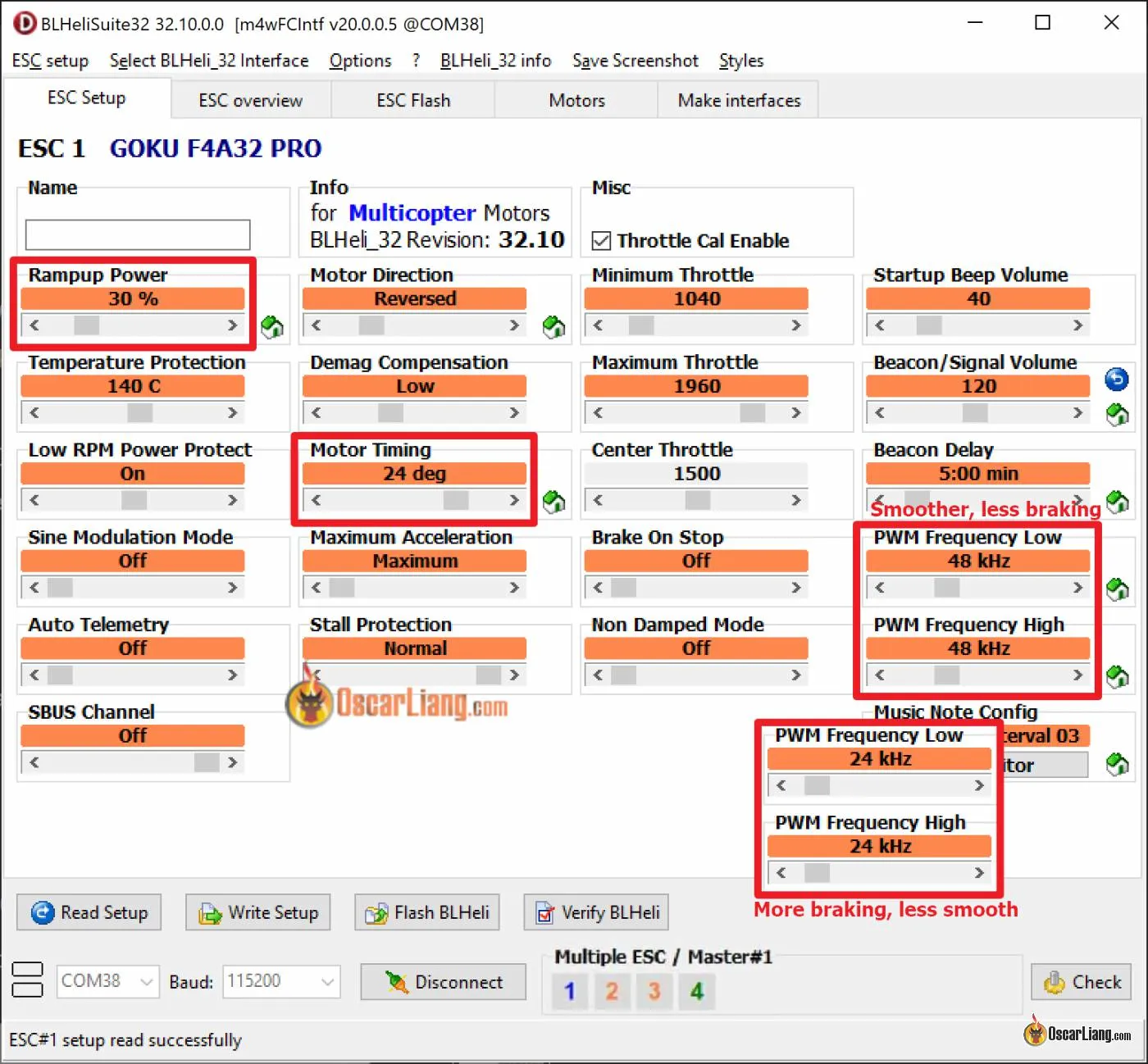
I’ve a put up explaining the greatest BLHeli32 settings. Right here’s the abstract (for five″ drones):
For BLHeli_32 ESC:
- Rampup Energy: 30%
- Motor Timing: 24
- PWM Frequency: Set LOW and HIGH to mounted 24KHz or 48KHz. 48KHz is usually safer for gyro noise, making your quad smoother and simpler to tune. 24KHz gives higher braking energy, which is useful for prop wash dealing with and responsiveness, however with the next threat of vibration. In case you are on the fence, simply go together with 48KHz.
For BLHeli_S ESC, flash Bluejay to allow bi-directional DShot, required for RPM filter and Dynamic Idle. I’ve a information on learn how to flash it right here: https://oscarliang.com/bluejay-blheli-s/

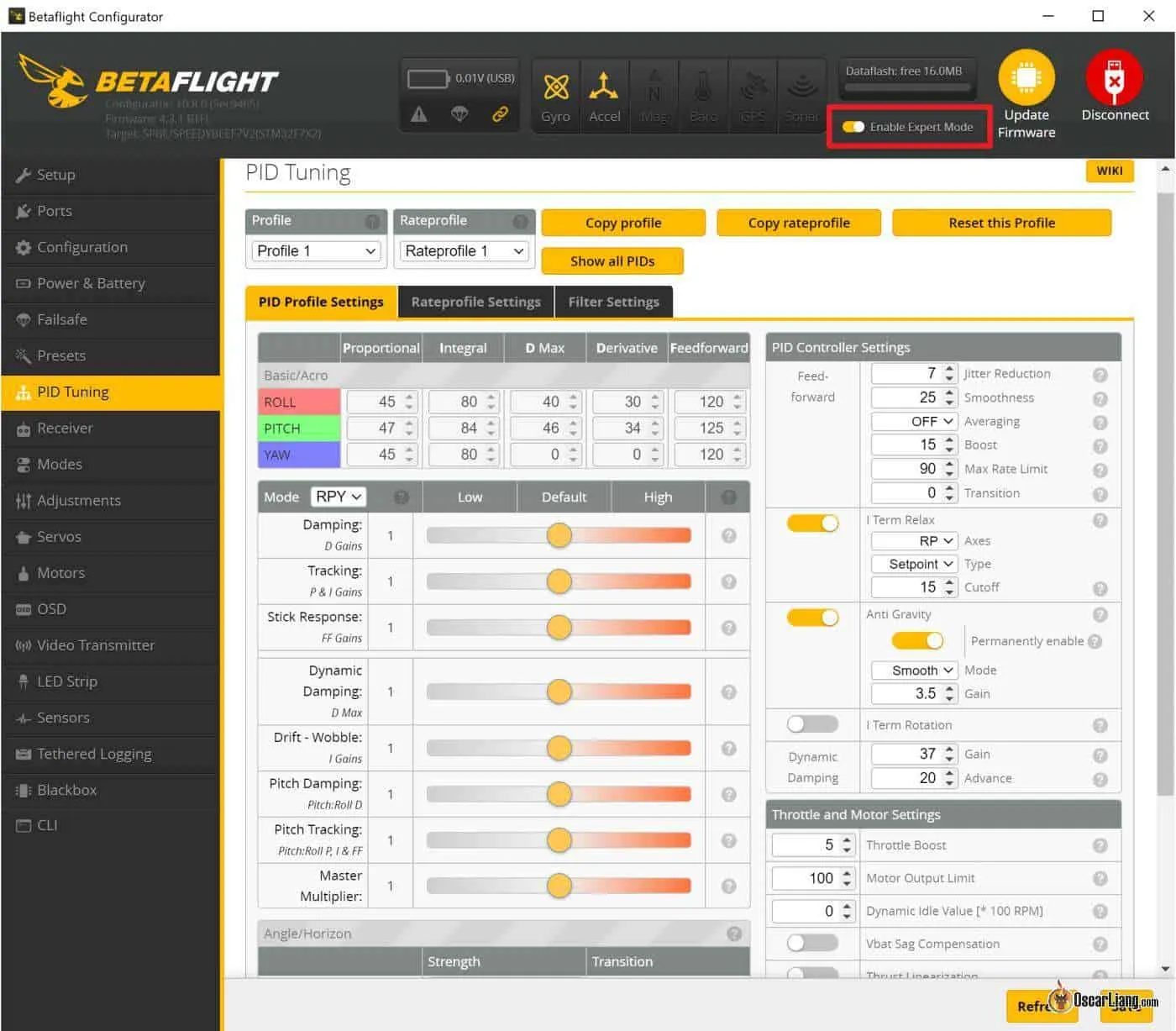
3. Flash the most recent model of Betaflight firmware to your flight controller and depart PID/filter settings at default. Allow Professional Mode in Betaflight Configurator to entry all sliders and choices on the PID Tuning web page.
Within the Configuration tab, set your PID Loop Frequency, and within the Motor tab, set your ESC protocol:
- DShot300 for 4KHz or 3.2KHz Loop Frequency
- DShot600 for 8KHz Loop Frequency
4. Within the Motors tab, allow Bi-directional DShot.
Most trendy ESCs assist Bi-directional DShot. I’ve a tutorial on learn how to allow RPM filter. For BLHeli_32 ESC it really works out of the field, however in case you have BLHeli_S ESC, you’ll want to flash Bluejay firmware (tutorial) first.
Verify if it’s working correctly by operating the motors within the Motors tab (with out propellers) and making certain the error fee (E) stays at 0%. If not, strive a slower DShot protocol like DShot300 or DShot150. If errors persist, you may simply have to surrender on Bi-directional DShot and RPM filter.
As soon as enabled, go to PID tuning tab, Filter Settings, the place you possibly can allow the Gyro RPM filter, among the finest filters in Betaflight.

5. Load the suitable RC_Link preset.

Completely different RC hyperlinks require particular RC smoothing and feedforward configurations. Incorrect config may cause stuttering and vibrations. My favourite RC hyperlink is ExpressLRS, try what radio gear I take advantage of right here.
Loading the appropriate RC_Link preset in Betaflight will apply the mandatory configurations robotically. Bear in mind to decide on choices primarily based in your flying fashion, for most individuals it could be Freestyle.
For Crossfire, lock the packet fee to both 50Hz (longer vary, greater latency) or 150Hz (decrease latency, much less vary) utilizing the TBS Agent Lite LUA script.
6. Decrease TPA
Within the PID tuning tab, set the TPA breakpoint from 1350 to 1750 to keep away from TPA masking oscillation points at low/mid throttle throughout tuning. Positive-tune TPA on the finish if oscillation points happen at excessive throttle, however usually I’d decrease using TPA each time attainable.

The right way to use PIDToolBox and Blackbox Explorer?
I will likely be utilizing each PIDToolBox (PTB) and Blackbox Explorer (BE) in my PID and filter tuning.
PIDToolBox will likely be our foremost instrument, it’s by far essentially the most highly effective Blackbox instrument obtainable. It means that you can examine a number of logs facet by facet, making it simpler to see the consequences of your filter modifications. The Step Response instrument is very helpful for tuning PID. The spectral analyzer in PTB makes use of decibels on the Y-axis, offering extra correct and goal comparisons. PTB additionally estimates filter delays, which could be very useful.
Nonetheless, PTB may be slower and fewer intuitive to make use of in comparison with Blackbox Explorer. For fast checks or troubleshooting a single log, BE is quicker and simpler. However for noise and filter tuning, PTB is the best way to go.
Filters Tuning
You will discover all of the filters in Betaflight within the PID Tuning tab. Don’t be intimidated by all of the settings, on this tutorial, we’ll largely solely deal with the inexperienced sections (RPM filter and Dynamic Notch) and alter the orange sections (Gyro and D Time period Lowpass Filters) utilizing the sliders. No want to the touch the purple sections.
Additional studying: Be taught in regards to the various kinds of filter in Betaflight on this tutorial.

Good {hardware} can cut back the necessity for intensive filtering. Guarantee your body is well-designed with out resonance points, use well-balanced propellers, and high-quality motors with clean bearings.
Performing Flight for Noise Evaluation
- Take Off: Fly ahead with minimal throttle and stick inputs.
- Throttle Sweeps: Slowly ramp up throttle to 100% over 5-10 seconds. This take a look at exhibits vibrations throughout the throttle vary and body resonances.
- Repeat: Carry out 2-3 throttle sweeps, then land and disarm.
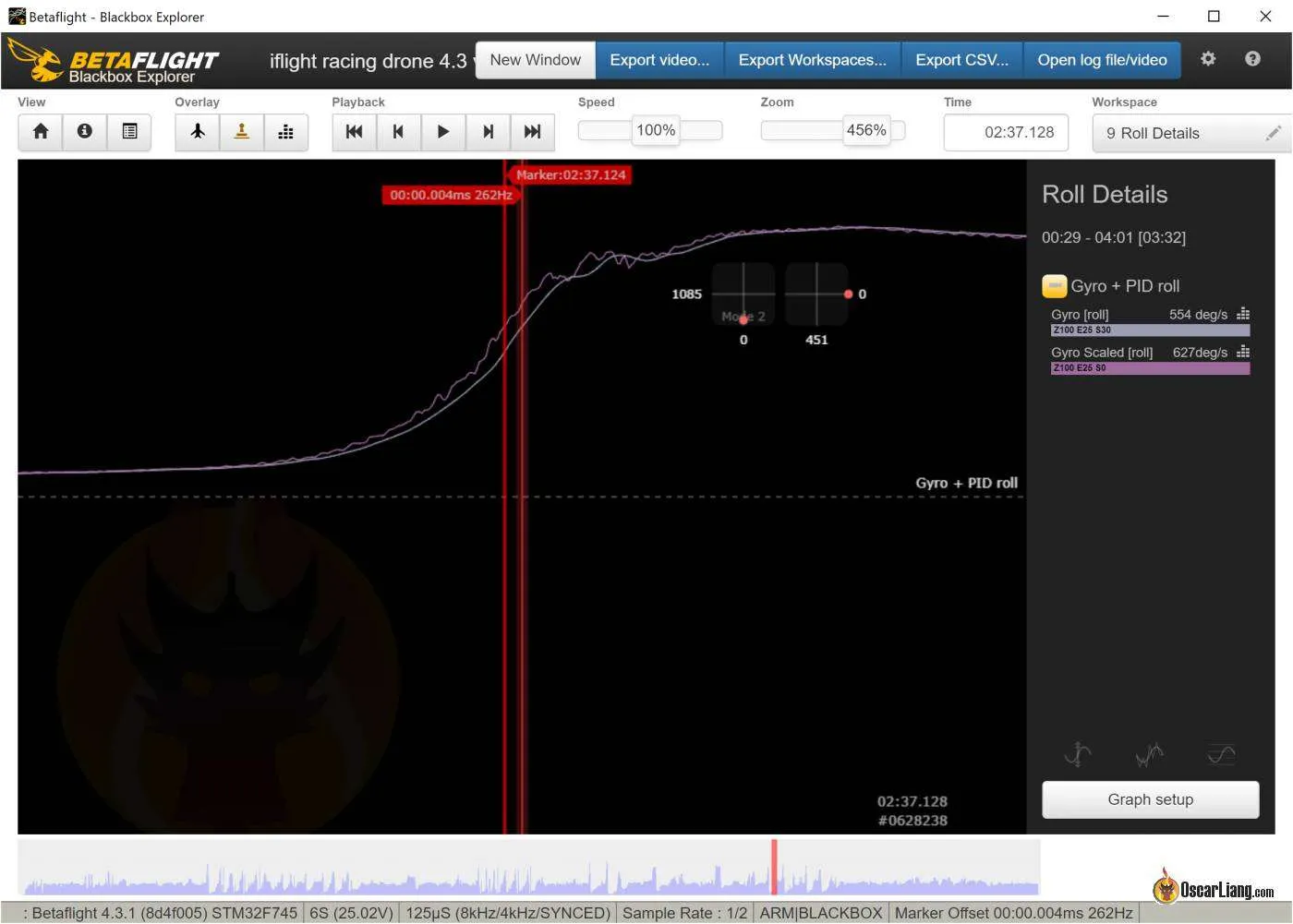
That is what a typical throttle sweep log would appear like (see the underside bar for throttle modifications).

Gyro Noise Frequency Defined
Open the throttle sweeps log in Blackbox Explorer and click on on “Gyro_Scaled” on the correct hand pane, that is the unfiltered gyro sign. Take away the takeoff and touchdown elements of the log by urgent “i” and “o”.
Right here’s a breakdown of the uncooked gyro sign frequency graph from a typical 5″ FPV Drone:
- Below 20Hz: Drone flight actions.
- 20Hz – 100Hz: Propwash and oscillations from suboptimal PID, problematic ESC config, unhealthy RC hyperlink settings, and so on.
- 100Hz – 250Hz: Body resonance or free elements.
- Above 250Hz: Noise from motors and propellers, and harmonics.

Every little thing beneath 20Hz is “good” drone movement reacting to the sticks.
Between 20Hz and 100Hz is the place undesired vibrations, equivalent to oscillations and propwash, happen. As a common rule of thumb, you wish to see little exercise on this frequency vary. Having some is regular, however an excessive amount of means you’ve gotten an oscillation subject that must be addressed. Usually, we attempt to keep away from filtering beneath 100Hz as a result of these are actual motions of the drone that we both wish to work with or towards. Filtering on this low-frequency vary can really make issues worse as a result of it introduces an amazing quantity of latency. Analyzing the spectra below 100Hz may give you perception into vibration or mid-throttle oscillation points and the way nicely the copter handles propwash.
We don’t care about something above 1000Hz as these have little impact on our drone. What we wish to deal with filtering is the noise between 100Hz and 1000Hz.
Delay Attributable to Filtering
Maybe not intuitive, however over-filtering can really trigger oscillation to indicate up as noise within the sub-100Hz spectra. That’s as a result of filtering creates delay. When the quad tries to right the error, the response could be too late because of the delay, which may be counterproductive. It could possibly make the error worse and create a suggestions loop, inflicting the drone to oscillate.
That’s why, if we use much less filtering, noise points below 100Hz can generally really get higher as a result of latency is decreased and the quad can react sooner to right PID errors. Utilizing much less filtering additionally means that you can push PID beneficial properties greater, which makes your quad observe setpoint higher and helps fight propwash.
You will discover out how a lot delay is added to the Gyro sign because of filtering by plotting Gyro and Gyro_Scaled and measuring the hole between them.
In PTB, it robotically estimates the delay brought on by gyro filtering and D-term filtering (see the highest proper nook of the primary graph within the second column).

Filter Technique
My common filter technique is to get rid of motor noise bands utilizing the RPM filter, then crush out body resonances with dynamic notch filters, and at last, cut back the ambient noise ground with Gyro and D-term lowpass filters. I will likely be tuning filters on this order:
RPM Filter > Dynamic Notch Filter > Gyro Lowpass > D-term Lowpass
We wish to use as little filtering as attainable to reduce latency, however on the identical time, we want sufficient filtering to keep away from burning our motors when flying residence with a bent prop. You may actually play it secure and apply extra filtering than wanted, however over-filtering makes the drone really feel disconnected and gradual to react because of the elevated delay. It could possibly additionally worsen propwash. So, we have to try for a steadiness.
Other than checking Blackbox logs, motor temperature is one other helpful indicator in filter tuning. When motors get too sizzling, it often signifies that the filtering is just too aggressive.
Professional Tip: Scorching Motors – How Scorching is Too Scorching?
As a common rule of thumb, should you pinch the motor bell and may’t hold your fingers on it for quite a lot of seconds, it’s too sizzling and you’re most likely pushing your settings too aggressively.
How Clear is Your Construct?
Earlier than we start tuning, it’s necessary to examine in case you have a clear construct. Begin by performing throttle sweeps as beforehand described.
Load the log in PIDToolBox, click on on the Spectral Analyzer, choose “Gyro prefilt” (the uncooked, unfiltered gyro sign; “Gyro” is the filtered sign), and hit Run.

The default filter settings in Betaflight are pretty conservative, and most builds ought to be capable to cut back filtering from there. In case your quad is already noisy with default filter settings, as a substitute of accelerating filtering, it’s best to search for attainable mechanical or electrical points. Guarantee you’ve gotten a capacitor on the ESC enter energy, all screws are tightened, and also you’re utilizing contemporary new props, and so on.
On a clear 5″ quad, there needs to be little exercise between ~50Hz (the quad’s actions) and ~200Hz (motor vibration). When you’ve got a whole lot of noise on this area, it may very well be electrical noise (maybe the gyro enter energy is just too noisy, or it requires an additional capacitor on the ESC enter energy) or mechanical (e.g., a wire hitting the gyro). Reaching optimum filtering on this situation could be more difficult.
As instructed by the creator of PIDToolBox, it’s very best to have the general noise ground beneath -30dB above 50Hz. For D-term, it’s very best to have the general noise ground beneath -10dB. Analyzing the noise ranges in these areas may give you a superb indication of how clean your quad flies. The noise stage is influenced by the construct high quality of the drone, the standard of the {hardware}, and generally you may simply have a loud gyro.
In case your quad is noisier than this (e.g., there’s a peak within the center above 0dB), then you will have extra filtering. It’s not the tip of the world; it simply means the latency will likely be greater, and also you gained’t be capable to push PID beneficial properties as excessive.
Tuning RPM filter
Motor noise is the first supply of noise for FPV drones, and the RPM filter is likely one of the handiest filters in Betaflight for tackling motor noise. On a clear construct, the RPM filter and Dynamic Notch filters will do a lot of the work, permitting us to disable many different filters to reduce latency.
Let’s have a look at some examples of motor noise:
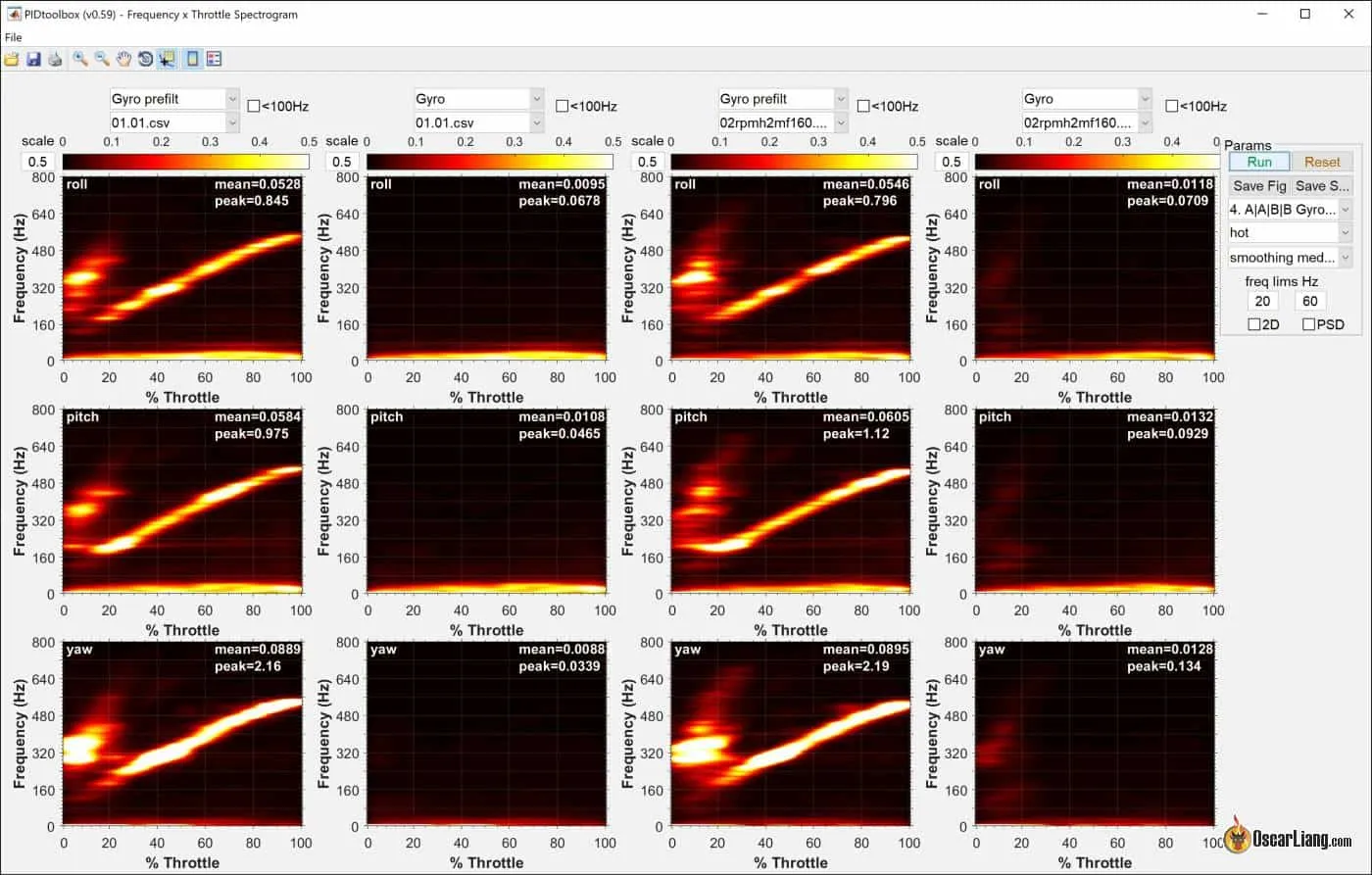
- Load the “Throttle Sweeps” log in PTB, click on Spectral Analyzer and click on “Freq x Throttle“.
- Below “Presets” choose “Gyro Prefilt, Gyro, Dterm Prefilt, Dterm” and hit Run. That is what I name “warmth maps”.

Right here’s a breakdown of what we’re taking a look at:
- Near 0Hz: The very brilliant horizontal line on the backside (1) represents the drone’s movement reacting to the sticks.
- Round 200Hz: This horizontal line (2) signifies body resonance. Its frequency doesn’t change with throttle place however is strongest the place it intersects with the motor band.
- Basic Motor Noise Band: This diagonal line (3) is often the brightest. Motor noise usually will increase in frequency with throttle stage.
- Harmonics: These are multiples of the basic motor noise band. In our instance, harmonics (typically dimmer and tougher to identify) present up as strains (4) and (5). Attempt adjusting the size in the event that they aren’t seen. Word that 2-blade propellers have a tendency to indicate extra and stronger harmonics than 3-blade props.

We’ll use RPM filter to maintain these motor noise bands.
The purpose is to optimize the variety of RPM harmonics used and set the very best attainable “Min Frequency” primarily based on the beginning frequency of the motor band. Fewer RPM harmonics and the next min frequency end in much less filtering and decrease latency.
Use the Information Cursor Software, click on on the place the motor band begins to search out the precise frequency. Verify this within the roll/pitch/yaw graphs and take the bottom frequency.

Right here’s an instance from my new Supply One V5 construct:
- On the left, is the default RPM Filter, 3 harmonics with a min frequency of 100Hz.
- On the correct, I modified it to 2 Harmonics with min frequency of 160Hz
By decreasing one harmonics and lift the cutoff frequency, you possibly can maybe see extra unfiltered noise from the third motor harmonics.
Though it’s fairly weak, it could possibly nonetheless get amplified when it will get into D time period. Let’s examine the Dterm warmth map beneath on the correct, as you possibly can see, a tiny little bit of gyro noise has grow to be fairly unhealthy Dterm noise.

On this instance, it’s most likely higher to have 3 harmonics in RPM filter.
The opposite factor you may need observed is a few noise round 116Hz left unfiltered as a result of we raised the min freq to 160Hz. To deal with that, we’ve to decrease Min Freq, i.e. round 20Hz beneath the noise frequency could be very best.

Right here’s a comparability of gyro sign after filtering utilizing 3 totally different settings:
- left: 2 harmonics 160Hz min freq
- mid: 3 harmonics 130Hz min freq
- proper: 3 harmonics 100Hz min freq

To crush out the motor bands, it appears we will’t actually cut back RPM filter. On this instance, the default settings (3 harmonics and 100Hz min frequency) labored greatest.
RPM Crossfading
This superior function fades within the RPM filter power over a variety (form of like TPA), the default is nice for many 5″ builds however it may be optimized particularly for bigger or smaller builds, because the motor noise may begin greater or decrease in frequency, and also you may want it to fade in additional shortly or slowly is determined by the noise. This function is just accessible in CLI, for instance:
set rpm_filter_min_hz = 100 set rpm_filter_fade_range_hz = 50
This implies the RPM filter begins at 100Hz at minimal power and reaches full power at 150Hz.
Q Worth
Growing the Q worth of a notch filter makes it extra targeted on the focused frequency, decreasing latency. Modify this within the CLI:
set rpm_filter_q = 500
Default values often work nicely, however you possibly can fine-tune by rising the Q worth till motor noise turns into seen within the filtered gyro diagram, then again off. Don’t exceed 1000.
RPM Filtering Dimming
This permits particular person management of every RPM filter to focus on harmonics. For instance, when utilizing 3-blade propellers, the second harmonics is often not very sturdy, however the third harmonics is. On this case you should use extra filtering power on the third harmonics and fewer on the 2nd:
set rpm_filter_weights = 100, 0, 80
And when utilizing 2-blade propellers, the place 2nd harmonics is stronger than the third harmonics, you are able to do one thing like this:
set rpm_filter_weights = 100, 80, 0
You may additional lower RPM filter weights so long as motor noise isn’t seen within the filtered gyro diagram.
Tuning Dynamic Notch Filter
The dynamic notch filter suppresses sign peaks within the gyro sign, that are largely vibrations from the body or different {hardware} parts, equivalent to body resonance, antennas, GoPro mounts, and bent propellers.
When the RPM filter is enabled, Betaflight will robotically cut back the quantity of Dynamic Notch filtering by utilizing fewer notches and the next Q worth for the reason that RPM filter will do a lot of the heavy lifting. You may additional tune the Dynamic Notch filter primarily based in your setup.
Establish Body Resonances: Take a look at the warmth map and establish what number of body resonances there are to find out the variety of notches wanted. As much as 5 notches can be utilized, however often, 1 or 2 are ample except your drone is poorly constructed or in a beat-up situation. With the RPM filter enabled, 1 notch is usually sufficient to deal with body resonance.
Decide Q Worth: The Q worth determines the width of the filter. The next Q worth means a narrower filter, which leads to much less filtering and decrease latency.
- Default Q: Begin with the default Q of 500.
- Modify Q: If the default is working nicely, strive rising it to 600 and even 700. Keep away from exceeding 1000. For those who nonetheless see body resonance noise after filtering, decrease the Q worth.
- Verify D-term Heatmap: Analyze the D-term heatmap to see how modifications within the Q worth have an effect on D-term noise.
Set Min/Max Frequency: These are the cutoff frequencies, defining the efficient vary of the Dynamic Notch filter. Add 20-30Hz to every facet of the resonance for the vary.
Keep away from setting the Min Frequency too excessive for security causes, as bent props can create large resonance. In case of a crash, a broader frequency vary can assist catch new resonances and stop motor overheating or injury. We don’t know precisely the place that resonance goes to be, however having a wider frequency vary has the next likelihood of catching it. If the Dynamic Notch fails to catch these newly pop up resonances because of Min Frequency is about too excessive, your motors can get sizzling and even burn in these conditions.
With out RPM Filter: In case your quad can’t use RPM Filter, for instance on a tiny whoop, you possibly can attempt to allow Dynamic Notch Filter with 5 harmonics, Q issue 350 and Min Frequency at 100Hz as a place to begin, then tune it by working your approach up.
In an instance setup, there seems to be one body resonance round 210Hz.

I attempted rising Q to 700 and setting the min/max frequency to 160-230Hz, however Q was clearly too excessive. There’s extra unfiltered noise, and it will get into Dterm and get amplified.

Lastly, once I set Q to 450, the noise is sufficiently managed. Within the beneath graphs, on the left is Q=700, the correct is Q=450. You may examine Dterm heatmap once more to verify that is working nicely.

Tuning Gyro Lowpass Filter
Normally, you can begin by turning off the Gyro Lowpass 1 filter as it’s typically pointless. Check fly aggressively for 30 seconds and examine the motor temperature to make sure they aren’t sizzling earlier than continuing.

Use the “Gyro Filter Multiplier” slider to cut back Gyro Lowpass 2 a few notches at a time. Transferring the slider to the correct will increase the frequency, which reduces filtering, leading to much less delay, higher prop wash dealing with, and the potential for greater PID beneficial properties.

Right here’s a comparability of the gyro frequency spectrum at totally different Gyro Lowpass filter slider values: 1.0 (brown), 1.5 (purple), and a pair of.0 (orange).
The three strains nearly overlap, suggesting that the Gyro Lowpass filter isn’t considerably affecting the sign and may be decreased. Curiously, the noise within the sub-100Hz spectrum barely improves with much less filtering, which aligns with our earlier discussions.
Necessary Concerns:
- By no means disable the Gyro Lowpass 2 filter for 2K/4K PID loop frequencies because of anti-aliasing causes.
- Minimal Frequency:
- For 2K loop time, depart Gyro Lowpass 2 at a minimal of 500Hz.
- For 4K, you possibly can set Gyro Lowpass 2 as much as 1000Hz.
- For 8K, you possibly can disable Gyro Lowpass 2 fully if noise isn’t a difficulty.

Tuning D Time period Lowpass
D time period is way noisier than Gyro because of its delicate nature and noise will get amplified as frequency will increase. Due to this fact, be additional cautious and conservative when coping with D Time period filtering.
Attempt shifting the “D Time period Filter Multiplier” slider to the correct a notch at a time and see how the drone responds in a 30-second take a look at flight (do some acro strikes), additionally examine motor temperature after touchdown. In the event that they get sizzling it’s best to return a notch or two.
Keep away from being too aggressive with decreasing D Time period filtering. Depart some headroom for attainable bent props throughout flight. Too little D Time period filtering mixed with a broken propeller can result in sizzling or burned motors.
Right here’s a comparability of D-term filtering slider positions: 1.0 (brown), 1.3 (purple), and 1.6 (orange). As seen within the heatmap, much less filtering ends in extra noise for D-term, not like Gyro lowpass.

From left to proper, the heatmap exhibits unfiltered D time period, D-term lowpass filter at 1.0, 1.3, and 1.6.
For those who hear the motors getting tough (thrilling oscillation) as you cut back D-term filtering, it’s because of the rising noise beneath 100Hz. You may affirm this by checking the <100Hz graphs. On this instance, staying beneath 1.3, possibly 1.2 and even simply 1.1, could be safer.

After tuning PID beneficial properties, revisit D Time period filtering to see if it may be additional optimized.
If the D Time period traces are very noisy, one or two clicks extra filtering on the slider might assist. If the D time period hint could be very clear, you possibly can maybe cut back filtering a bit extra (if motors are usually not sizzling). See beneath graphs, the left has a loud D time period hint, the correct is way cleaner.

Necessary: NEVER disable D-Time period lowpass filters utterly, you’ll burn your motors.
Gyro/D Time period Notch Filters
There’s no have to allow Gyro Notch Filter and D Time period Notch Filter, these are static notch filters which have grow to be legacy since RPM filter and dynamic notch filters are doing a lot of the work.
Nonetheless, if there’s a sturdy resonance at a particular frequency (equivalent to body resonance), a static notch filter may be useful. The dynamic notch filter often covers it, so a static notch filter is usually pointless. You may strive including a static notch for identified body resonance and cut back the dynamic notch depend by one to see which technique works higher in your setup.
Yaw Lowpass Filter
The default yaw lowpass filter at 100Hz cutoff has minimal latency penalty and may be left untouched. This filter is very useful for whoops, because it helps to cut back yaw spin in collisions.
PID Tuning
To tune PID utilizing Blackbox, I comply with the “Basement Tuning” methodology utilizing PIDToolBox. This methodology is beginner-friendly and may be completed in a small house like a basement or bed room, therefore the identify. It includes performing a sequence of quick flights with barely totally different PID values, then evaluating the logs to search out the optimum beneficial properties.
Throughout the flights, transfer the quad round on the pitch and roll axes. You may be taught extra in regards to the basement methodology on this video by PIDToolbox.

Though the strategy is named “basement tuning,” I’m not comfy doing this indoors. I’ve had a few “fly to the moon” incidents previously, almost drilling a gap within the ceiling. Due to this fact, I at all times carry out these checks in a backyard or native park for security.
Fee Profile and Angle Mode
Performing basement tuning flights requires good line-of-sight flying abilities to maintain the drone managed in a confined house. Listed below are some tricks to make it simpler. Do that fee profile:
- Middle Sensitivity 250
- Max Fee 400
- Expo 0.00
This profile has a low max fee, making it much less more likely to lose management should you transfer the sticks an excessive amount of. The excessive and linear heart stick sensitivity ensures the stick inputs are vital sufficient for correct logging.
Performing the take a look at in Angle mode could make it even simpler than in Fee mode. In line with the creator of PIDToolBox, Angle mode works simply in addition to Fee mode, however you’ll want to do the next first:
- Go to the Setup tab and calibrate the accelerometer.
- Within the PID Profile Settings, set the Angle mode power to 100.
- Click on Save to make sure the modifications are utilized.
Discovering P/D Steadiness
Initially, decrease these beneficial properties in order that they don’t intrude with our tuning:
- Set the “Stick Response” slider (Feed Ahead) to 0
- Set the “Dynamic Damping” (D Max) slider to 0
- Set the “Drift-Wobble” (I beneficial properties) slider to 0.2, it’s low sufficient that it shouldn’t introduce overshoot but have just a bit I phrases to assist stabilize the quad higher, makes it simpler to manage

Modify the “Damping” (D beneficial properties) slider, begin with a minimal worth you wish to take a look at. For a typical 5-inch FPV drone, 0.6 is an effective place to begin.

Here’s what you wish to carry out within the flight:
- Arm and hover
- Continually shifting the roll and pitch stick for 20-30 seconds, the extra actions the extra correct it is going to be
- Do as large strikes as you possibly can with out hitting the partitions (ideally full stick deflections)
- You may transfer each pitch and roll collectively so long as you possibly can hold it below management
- Attempt to not cease/hover for too lengthy throughout flight, and be as steady as you possibly can
Elevating the Damping slider by 0.2 every time and repeat the flight: e.g, 0.6, 0.8, 1.0, 1.2, 1.4, 1.6. Once you increase D achieve too excessive, your motors will sound tough, subsequently you possibly can’t at all times take a look at the final one or two values, which is okay.
The quickest option to change slider worth is by going into Betaflight OSD menu, Profile, Simplified Tuning. However if you’re unable to do that then simply plug within the USB cable and use the Betaflight Configurator.
![]()
It’s a good suggestion to vary battery each 2-3 flights to make sure the consequence isn’t affected by voltage. Energy cycle the quad by unplugging the battery earlier than each flight so it creates a brand new log. Or just select “Save and Reboot” within the OSD menu so that you don’t have to unplug.
16MB reminiscence needs to be sufficient for six 30-second flights should you time it nicely.
After you’ve gotten accomplished all of the flights, obtain them to your laptop. To arrange the logs higher, I’ve a folder construction created for this course of, obtain right here: https://drive.google.com/file/d/1tx1AV2lOMgknAwIB3VFhqP1i6VpDLVjr/view?usp=share_link

And I rename the logs to one thing like “01 d06“, “02 d08” and so on (01 means first take a look at flight, d06 means damping slider worth 0.6), and put them within the “02 PD Steadiness” folder.
Load all of the logs in PTB, undergo each and take away the take-off and touchdown elements for every log (to do that, allow “Trim” on the correct hand panel).

Click on the “Step Resp Software“, choose all of the recordsdata and click on Run. in case you have offset within the curves (gyro curve shifting away from setpoint in the direction of the tip), allow Y Correction.

It’s fairly straight-forward, merely choose the very best trying line, that’s your optimum Damping slider worth. The best response ought to look one thing just like the inexperienced line within the following graph, little to no overshoot. Having a tiny little bit of overshoot is suitable.
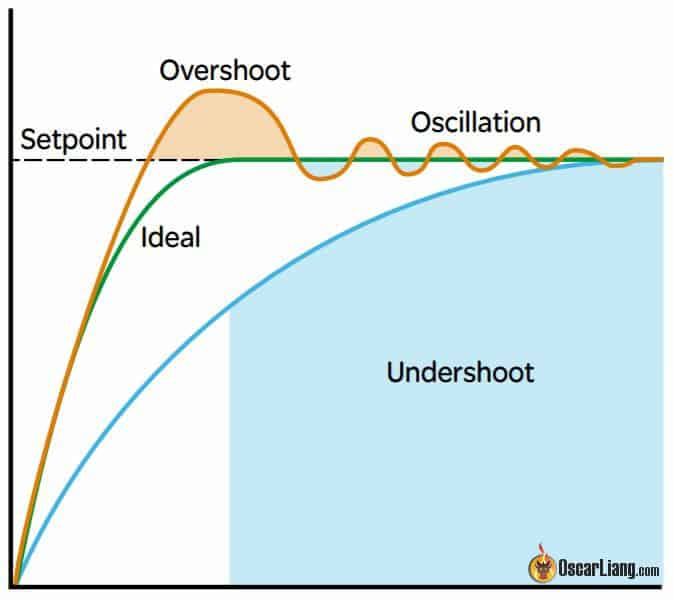
In case your traces don’t look clean however have a number of ups and downs, that’s known as oscillation, and it’s an indicator that the sign is just too noisy or your actions aren’t sufficiently big.
The graphs on the correct are additionally extraordinarily useful:
- Peak is highest amplitude of the overshoot (ideally the nearer to 1 the higher)
- Latency is the time it takes to succeed in setpoint (ideally the decrease the higher)

When D achieve is low, you’re going to get overshoot and even oscillation. As D achieve will increase, there will likely be much less overshoot and Peak will lower, however Latency will go up in consequence. When D is just too excessive (undershoot), the preliminary peak may not even attain the setpoint and this isn’t very best. Discover a response that has minimal overshoot and but has comparatively low Latency.
You may zoom in and see it extra clearly (or choose fewer logs, and hit Run once more). We solely want to have a look at Roll and Pitch axis.
In our instance, it’s fairly clear the best worth is orange (3) for each pitch and roll, so that will be 1.0.
It’s fairly frequent to have a unique PD steadiness on pitch and roll because of the totally different weight distribution. If that’s the case for you, take the Damping slider to the place you need for pitch, write down the pitch D achieve, then take the Damping slider to the place you need for roll, and alter the Pitch Damping slider to match the pitch D achieve you simply wrote down.

Generally it’s higher to be just a little extra conservative and keep away from having D achieve too excessive. In case you are on the fence, at all times go together with much less D achieve (the next P/D ratio), so you possibly can increase your total PID beneficial properties greater on the finish since D is often the limiting issue.
What I’ve discovered is that the step response instrument tends to be fairly delicate and the P/D steadiness could be decrease than what I’d personally choose. So I usually bump up P/D steadiness by 5-10% after discovering a super worth. That’s simply my private desire, you may give {that a} strive if you’d like.
Drone dimension additionally impacts PD ratio, bigger drones are inclined to have greater P:D ratio. For instance a 5″ may use 0.8-1.1 Damping slider whereas a tiny whoop may use 1.4-1.6.
Discovering Max D Acquire
Do the identical take a look at for Grasp Multiplier slider, transfer the slider in 0.2 steps. For a 5″ drone, begin with values equivalent to 0.8, 1.0, 1.2, 1.4, 1.6, and 1.8.

Be cautious and don’t stand too near the quad throughout this take a look at. When D achieve is just too excessive, the quad might shoot up unexpectedly. Pay shut consideration to motor noise, and cease instantly should you hear thrilling oscillation.

You may discover that the shapes of the step response don’t change a lot between totally different values and that the Peak values stay roughly the identical. It is because the response curve form is principally decided by the P/D ratio. Growing the beneficial properties gained’t considerably have an effect on the response form, however bumping up P/D beneficial properties can cut back latency.
You might have reached the best Grasp Multiplier achieve when one of many following happens:
- Thrilling Oscillation: For those who hear thrilling oscillation, you possibly can’t improve D achieve any additional.
- Latency Plateau: If latency doesn’t lower anymore (or little or no), it means you’ve gotten reached the higher certain tuning window. The motors are working at their hardest, and you aren’t gaining any extra efficiency from them.
The utmost achieve achievable is influenced by the noise stage of your construct and the quantity of filtering used. Much less filtering permits for greater PID beneficial properties. Generally, it’s safer to cut back the Grasp Multiplier slider by a notch or two as soon as you discover the utmost worth. Keep away from pushing D achieve to the restrict to account for potential points like bent props.
Drones utilizing greater cell depend batteries (greater voltage) are inclined to require decrease D beneficial properties. For instance, on a 6S quad, D beneficial properties could be within the 30s, whereas on a 4S they’re often within the 40s.
In my instance, 1.6 appears to be the worth that offers the least quantity of latency, with little enchancment when rising to 1.8.
For those who can’t hear thrilling oscillations, use the Spectral Analyzer to plot D-term. As beneficial properties improve, motors might produce an exciting sound peaking round 40-80Hz, particularly when throttling up. If noise on this frequency vary will increase with greater beneficial properties, it signifies the onset of PID-related oscillations.
On this instance, you possibly can clearly see peaks round 60Hz for 1.4 (olive), 1.6 (inexperienced), and 1.8 (cyan). Though 1.6 exhibits latency enchancment, I’d not threat it and would seemingly select 1.4 and even 1.3 to be secure.

There’s ongoing debate on whether or not it’s higher to have extra D-term filtering and better D achieve, or much less D-term filtering and decrease D achieve. Nonetheless, by no means run with much less D-term filtering and excessive D achieve as this could result in disastrous outcomes should you hit an impediment or bend a prop. It’s no joke, talking from expertise right here:
After discovering the optimum D achieve, examine setpoint monitoring by plotting Gyro and Setpoint. The strains needs to be roughly parallel, indicating the quad is accelerating and decelerating on the identical fee because the setpoint. Nonetheless, there may nonetheless be a big hole between them, indicating latency. Within the subsequent step, we’ll cut back this hole utilizing Feedforward.
![]()
Tuning Feed Ahead
Feed Ahead (FF) accelerates your quad while you transfer the sticks, making your quad extra responsive and nearer to the setpoint. Not like P time period, which reacts solely when there’s a PID error, Feed Ahead measures the speed of stick deflection. It will get the motors shifting as quickly because the stick strikes, making it a lot sooner than P time period.
Feed Ahead helps the quad reply promptly to stay inputs, offering a extra rapid and managed flying expertise. It’s useful for all flying types, together with cinematic flying, because it reduces latency between stick enter and quad response.

When tuning Feed Ahead I choose to do some snap rolls and flips and examine Gyro/Setpoint traces. Use your typical fee profile, or a default fee profile in Betaflight (simply change to an unused fee profile) to get an honest max fee at full stick. You may examine my charges right here: https://oscarliang.com/charges/#My-Charges
As a substitute of utilizing the step response instrument in PTB, use BE to examine the setpoint/gyro traces. The gyro ought to observe the setpoint extra carefully with much less delay. Ideally, the gyro needs to be proper on prime of the setpoint.
If Feed Ahead overshoots (gyro strikes earlier than the setpoint), the FF is just too excessive. Within the following demonstration, 0.5 is approach too low, 1.0 continues to be not excessive sufficient, however 1.5 is a tiny bit an excessive amount of and overshoots. I believe Feedforward at 1.3-1.4 ought to do it on this instance.
![]()
If the FF achieve is just too excessive, it could possibly trigger the P time period to react in the wrong way, making an attempt to counteract it.

Doesn’t matter what your flying fashion is, feedforward may be helpful and doesn’t apply solely to sure kinds of flying. Even cinematic flying can profit from a superb quantity of feedforward, if you’re shifting your stick easily and slowly, then feedforward gained’t kick in anyway. Once you want snappy response FF will cut back the latency between stick enter and quad response. In order for you clean flying, simply use expo, extra RC smoothing or decrease your fee.
There’s an elective setting, Feedforward enhance (FF Enhance). You wish to improve it if gyro lagging behind setpoint firstly of a transfer, however catching up in a while. However it’s best to cut back it if gyro will get forward of the setpoint firstly of a transfer, however falls behind later.
Tuning I Acquire
The best I achieve is essentially primarily based on really feel. You don’t want a whole lot of I achieve when you’ve gotten optimum P and D beneficial properties; you simply want sufficient to maintain the drone from drifting and wandering. In case you are cruising ahead with minimal stick inputs, the drone ought to maintain its place for some time. If there’s any drifting, then you definately want the next I achieve.
The I time period in Betaflight has a REALLY WIDE tuning window, particularly for highly effective 5″ quads. Sometimes, a variety of 0.5 to 1.5 on the I time period slider works tremendous for five″ quads. This vast window permits us to tune every part else first and alter the I time period final. With a excessive I achieve, your quad will really feel extra exact, but when the I achieve is just too excessive, you might expertise gradual oscillations, which you wish to keep away from.
I discovered the step response instrument in PTB will not be efficient for locating the I time period, because the step response for pitch and roll stays an identical whatever the I achieve slider worth (e.g., 0.4 to 2.0). Nonetheless, you should use it for tuning Yaw I achieve, which I discover often lands round 1 on the slider for 5-inch quads.

You may tune the I achieve by trying by the goggles and listening to the motors. For those who goal to push the I achieve as excessive as attainable, strive shifting the I achieve slider up till you discover gradual bouncebacks and oscillations throughout quick strikes, then cut back it a notch or two. Nonetheless, it’s actually onerous to get our quads to indicate bouncebacks, due to options like “I-term chill out” in Betaflight. These days, you should use extraordinarily excessive I achieve with out a lot unfavorable affect (equivalent to bouncebacks).
For five″ quads, I often depart the I achieve slider at 1.
With I-term chill out, you possibly can alter the cutoff primarily based on the drone’s responsiveness. For freestyle drones, you possibly can often depart it on the default setting. For racing drones, improve it to 30. For heavier drones like cinelifters and seven″ long-range drones carrying a GoPro, set the cutoff to 10.
Dynamic Damping
Dynamic Damping is a function that reinforces D achieve to the utmost throughout sharp strikes however doesn’t improve it throughout regular flight. This helps in decreasing motor warmth.
That is how I usually use Dynamic Damping:
- Word down your present D Max worth. This worth needs to be the identical as Spinoff as a result of the Dynamic Damping slider is about to 0 in the intervening time.
- Start by rising the Dynamic Damping slider to 1.
- Then cut back the Damping slider till the D Max worth stays the identical as earlier than, this may decrease the baseline D achieve used throughout regular flights to maintain your motors cool.
Or you possibly can simply depart Dynamic Damping slider at 0 and don’t change your Damping slider unchanged, it’s as much as you.
Different Settings
Anti Gravity Positive factors
Anti-Gravity (AG) beneficial properties assist cut back wobbling and nostril dips while you punch out after which let go of the throttle. AG briefly boosts I achieve throughout throttle pumps to mitigate these undesirable dips. Nonetheless, if the AG achieve is about too excessive, your quad might expertise speedy oscillation (stutter) while you launch the throttle, as a result of AG boosts each P and I.
Default is 8, cut back it should you see wobbles throughout quick throttle modifications. For five″ freestyle drones, I discovered 8 to 12 a superb vary.
You may tune AG by trying within the goggles, or examine for nostril dip in Blackbox logs, and see the impact of anti-gravity.

Dynamic Idle
Dynamic Idle improves stability, enhances propwash dealing with, and reduces the possibility of ESC desync. It will increase motor velocity when the throttle is at zero, bettering management authority and responsiveness at low throttle inputs. Different advantages embrace sharper flip and roll stops, extra responsive in low throttle and more practical braking.
When Dynamic Idle is about, Static Motor Idle (in %) within the Motors tab is disengaged.
To setup Dynamic Idle, you’ll want to
- Allow bi-directional DShot within the Motor Tab (if you have already got RPM filter enabled, you’re all set)
- Enter an acceptable Idle RPM worth within the PID Tuning web page (e.g., 20 to 40 for five″ drones).
The really useful Idle RPM worth is determined by propeller dimension and pitch. Smaller and decrease pitch propellers usually require greater values. Modify the worth greater in windy circumstances to counteract instability.
| Prop Sizes | Excessive Pitch Props | Low Pitch Props |
| 31mm/1.2″ | 84 | 167 |
| 40mm/1.6″ | 62 | 124 |
| 2″ | 50 | 100 |
| 2.5″ | 40 | 80 |
| 3″ | 33 | 66 |
| 3.5″ | 28 | 57 |
| 4″ | 25 | 50 |
| 5″ | 20 | 40 |
| 6″ | 16 | 33 |
| 7″ | 14 | 28 |
| 8″ | 12 | 25 |
| 10″ | 10 | 20 |
Concerns for Dynamic Idle:
- Excessive Worth: Reduces cling time when the drone is the wrong way up (motors push tougher in the direction of the bottom). It could possibly additionally make the quad hover barely at zero throttle, making throttle administration tougher.
- Low Worth: Dangers low throttle instability.
Setting the Ultimate Worth:
- Decide ESC Idle Worth: Default is often 5.5%. Check your motor within the motor tab utilizing a smoke stopper or bench energy provide to restrict present.
- Verify RPM: Spin the motor on the ESC idle worth (e.g., 5.5%, slider at round 1055) and observe the reported RPM (requires bi-directional DShot).
- Set Dynamic Idle: Use the RPM worth divided by 100 as the best Dynamic Idle worth.
Throttle Enhance
Throttle Enhance will increase your throttle worth while you quickly transfer the throttle stick up, providing you with additional energy. This may make throttle responses extra dynamic however also can make them unpredictable.
- Default Worth: 5
- Adjustment Suggestions:
- For those who discover the throttle onerous to handle, cut back the worth.
- Some racers disable Throttle Enhance fully by setting it to 0.
- Experiment with smaller values to see what works greatest in your flying fashion.
Voltage Sag Compensation
This function reduces the utmost motor drive worth when the battery is full and will increase it because the battery voltage drops. It offers extra constant flight efficiency all through the flight. However watch out it’d make you neglect when to land as a result of the quad would really feel related by the entire pack.
Thrust Linearization
- Really helpful Setting: Allow Thrust Linearization at 20%.
- Advantages:
- Boosts PID to enhance responsiveness and management at low throttle.
- Lowers PID at excessive throttle to cut back oscillations (just like TPA).
- Helps with nostril dips and is very helpful for whoops and drones utilizing 48KHz PWM frequency on ESCs.
Word: Because it boosts PID at low throttle, you may have to decrease the grasp multiplier slider if motors get sizzling.
TPA
TPA stands for Throttle PID Attenuation.
To tremendous tune TPA, carry out a throttle sweep and examine the frequency vs. throttle heatmap. For those who get oscillations above a sure throttle stage, by which case TPA can assist.
Within the newest Betaflight it solely attenuates D achieve above sure throttle stage (which is often the reason for the oscillations). Within the older Betaflight it attenuates each P and D, if you’d like you possibly can deliver this again by typing in CLI: set tpa_mode = PD.
Usually I choose to set throttle worth in TPA as excessive as attainable, so D achieve is extra fixed throughout a wider throttle vary. Be sure to set the throttle worth just a little decrease than the place the place the D time period associated oscillations begin to present up. For instance, if oscillation begins round 1800 throttle, I’d do one thing like this: TPA = 0.75, 1750.
Revisiting D Time period Filtering
After making the above modifications, revisit D time period filtering to see if changes are wanted. Enhance or cut back filtering as required.
I Time period Rotation and Absolute Management
These options are usually not wanted for FPV freestyle drones and are extra useful for line-of-sight pilots.
Tuning Yaw
Yaw usually doesn’t require a lot tuning because the default achieve works nicely. The tuning window for Yaw is sort of vast. Not like pitch and roll that are primarily based on thrust generated by propellers, yaw is predicated on the inertia generated by propeller rotation. Due to this fact, yaw will inherently be too gradual to overshoot setpoint, and there’s little have to tune yaw PID.
Yaw can be too gradual for D phrases to have any significant impact and it’s usually not required. Nonetheless you possibly can allow it if you’d like, but it surely may introduce extra downside than it solves, like vibrations and so on. So we’re left with P and I phrases for Yaw.
You may tune Yaw utilizing the step-response evaluation like we did with Pitch and Roll. Moreover, if gradual oscillations happen within the again a part of the graph, then I-Time period is just too excessive. If quick oscillations happen, then P-Time period is just too excessive.
When you’ve got yaw shakes when doing throttle pump, you possibly can isolate yaw from the slider tuning, and set Yaw PID individually. To do that, go to the PID tuning tab, within the ‘Slider Mode’ dropdown record, choose RP (Roll Pitch), as a substitute of RPY (Roll Pitch Yaw). This can exclude yaw values from the sliders, and means that you can enter PID numbers for yaw. For five″ freestyle and cinematic builds, strive 100 for each P and I’d be a superb place to begin. It’s also possible to strive greater values as yaw tends to be fairly gradual reacting.
There isn’t any good tune
How good is nice sufficient? You may at all times spend extra time enjoying with filters and PID numbers, and you might even see enhancements however it may be situational and the time you put money into it may not be proportional to the consequence. I usually simply cease when it seems to be “adequate” and depart it there except I’ve a particular downside I wish to clear up.
Troubleshooting Suggestions
Dangerous Gyro
A 5-inch FPV drone ought to fly easily on default Betaflight settings. In case your quad experiences vibrations, it may very well be because of mechanical or electrical points, or generally a nasty gyro on the flight controller (FC). Right here’s learn how to diagnose a nasty gyro:
- Symptom: One axis is considerably noisier than the others, particularly within the decrease frequency spectrum beneath 200Hz.
- Prognosis: Rotate the FC by 90 levels. If the noisy axis follows the rotation, the gyro may very well be defective.
Within the instance beneath, the pitch axis is way noisier than roll and yaw, with bursts of D time period noise brought on by the noisy gyro.
- Potential Causes:
- Excessive energy wires close to the gyro.
- Noisy energy provide to the FC.
- Poor board design.

Options:
- Eradicating any excessive energy wires close to the gyro .
- You may strive utilizing a 1000uF low ESR capacitor on the ESC energy.
- If already utilizing a capacitor, strive soldering an extra smaller 220uF-470uF capacitor to the facility of the FC (VBAT/VCC pad).
- Defective Gyro, changing FC.
RC Smoothing
RC smoothing is important in Betaflight to keep away from points with feedforward. Correct RC smoothing settings rely in your RC hyperlink. It’s greatest to load the suitable RC_Link preset to keep away from errors.
The Auto Issue is probably one of the crucial necessary values, decrease is extra twitchy and responsive whereas the next worth is softer and smoother however extra sluggish. Right here’s a common rule I personally comply with:
- 20-25: Racing
- 30: Default worth, nice for Freestyle
- 50: Cinematic
- 90: Extraordinarily clean cruising (noticeable delay)
- 120: Highest smoothness with out hassle (vital delay)
Dangerous gear/pilot require greater RC smoothing too, e.g. Low high quality radio management gear, worn out gimbals, pilots with shaky fingers, and so on. Mainly something which may contribute to jerkiness in RC instructions.
If attainable, examine black field logs to verify you’ve gotten clean setpoints, if the setpoint isn’t clean (has steppings from RC instructions), merely improve the smoothing barely.
When you’ve got noise in setpoint that peaks round 50Hz, 150Hz, 250Hz or 500Hz, then there’s most likely an issue with RC smoothing. These frequencies are frequent packet charges in RC hyperlink. On this instance, it’s Crossfire 150Hz.

In case you are not utilizing sufficient filtering for the RC instructions, you may not have smoothed out the RC sign sufficient and it might create noise on the frequency of your radio hyperlink packet fee.
RC smoothing removes stepping and bumpiness in your set-point, it makes P time period hint much less jerky. Nonetheless it additionally provides delay to feedforward in addition to setpoint, so your quad may really feel just a little bit much less responsive. RC Smoothing is helpful, however an excessive amount of smoothing defeats the aim of getting quick RC packet charges like ExpressLRS gives.
The purpose is to clean out the steppings however not including an excessive amount of delay. In order for you smoother RC enter, strive including some extra expo, it has related impact but it surely gained’t provide the latency penalty.
One of the best ways is to only load the suitable RC Hyperlink preset as I talked about right here. For those who did not load the right RC_Link preset in your explicit RC hyperlink and packet fee, it may also trigger issues to Feedforward. On this instance, feedforward jitters because of the lack of stepping smoothing in RC instructions.

PID Sum too low?
If the PID_Sum hits the default 500 restrict (50%) as a result of PID settings are very excessive, you possibly can increase the restrict to 1000. To do that, enter the next command within the CLI: set pid_sum_limit=1000. But it surely doesn’t at all times make a distinction in flight behaviour as motors may saturate at this fee anyway.

ADC Filter Jitters Inflicting Oscillations
For those who expertise random vibrations and wobbles because of feedforward jitters, even after making use of the right RC Hyperlink preset or rising RC smoothing, the difficulty may very well be because of the ADC filter.
Make sure the ADC filter is turned off in your radio’s system menu below the {hardware} web page.
Feedforward spikes seem within the Blackbox logs when the ADC filter is turned on, inflicting undesirable oscillations and vibrations.

Edit Historical past
- Nov 2022 – Information created
- Jun 2024 – Up to date to Betaflight 4.5